rustingcrab
CNN - Convolutional Neural Network em Rust!
Rede Neural Convolucional
É uma rede neural dupla, sendo que a primeira parte é dedicada a capturar as características de cada imagem, enquanto a segunda, classifica essa característica de acordo com os pesos.
Neste exemplo veremos a implementação de uma rede CNN simplificada em Rust, para treinar e inferir algarismos desenhados manualmente, baseados no dataset MINST.
Para começar, baixe o dataset e descompacte para uma pasta data na raiz do projeto:
cd data
wget https://ossci-datasets.s3.amazonaws.com/mnist/train-images-idx3-ubyte.gz
wget https://ossci-datasets.s3.amazonaws.com/mnist/train-labels-idx1-ubyte.gz
wget https://ossci-datasets.s3.amazonaws.com/mnist/t10k-images-idx3-ubyte.gz
wget https://ossci-datasets.s3.amazonaws.com/mnist/t10k-labels-idx1-ubyte.gz
gunzip data/train-images-idx3-ubyte.gz
gunzip data/train-labels-idx1-ubyte.gz
gunzip data/t10k-images-idx3-ubyte.gz
gunzip data/t10k-labels-idx1-ubyte.gz
Este é um exemplo de código em Rust que adapta a ideia do código fornecido para uma rede neural convolucional (CNN) simples. Esse exemplo implementa (de forma “do-it-yourself” e não otimizada) as seguintes camadas:
- Uma camada convolucional com função de ativação sigmoide;
- Uma camada de max pooling (com regiões não sobrepostas);
- Uma camada de flatten para transformar a saída 3D em um vetor 1D;
- Uma camada totalmente conectada (dense) com função de ativação sigmoide.
O treinamento usa o gradiente descendente estocástico (SGD) e o erro é calculado com MSE.
Atenção: Este exemplo é didático e simplificado. Para aplicações reais (como reconhecimento de objetos em imagens reais), recomenda‑se o uso de bibliotecas otimizadas e uma implementação mais robusta do cálculo dos gradientes (backpropagation).
Convolução
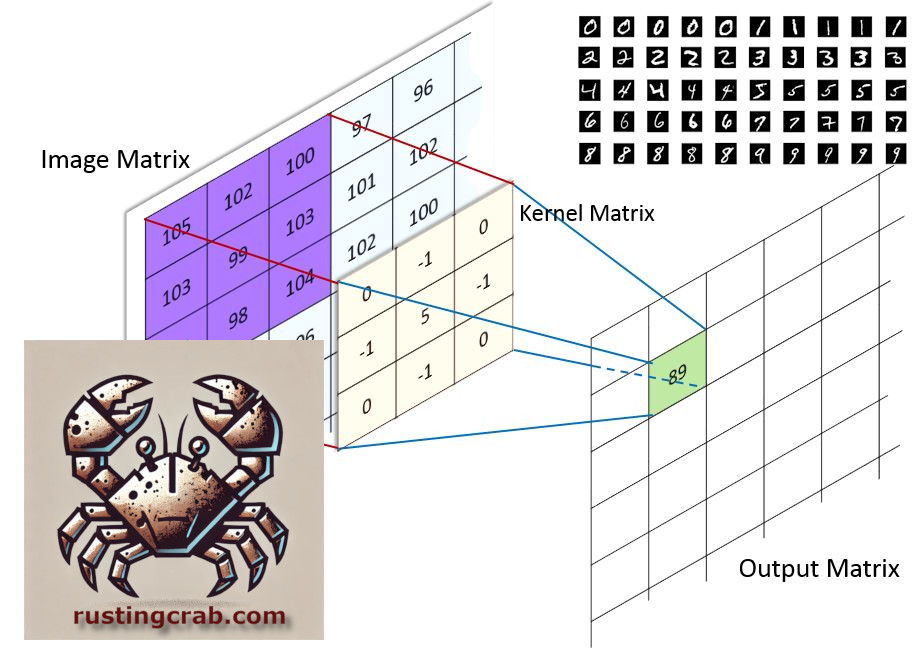
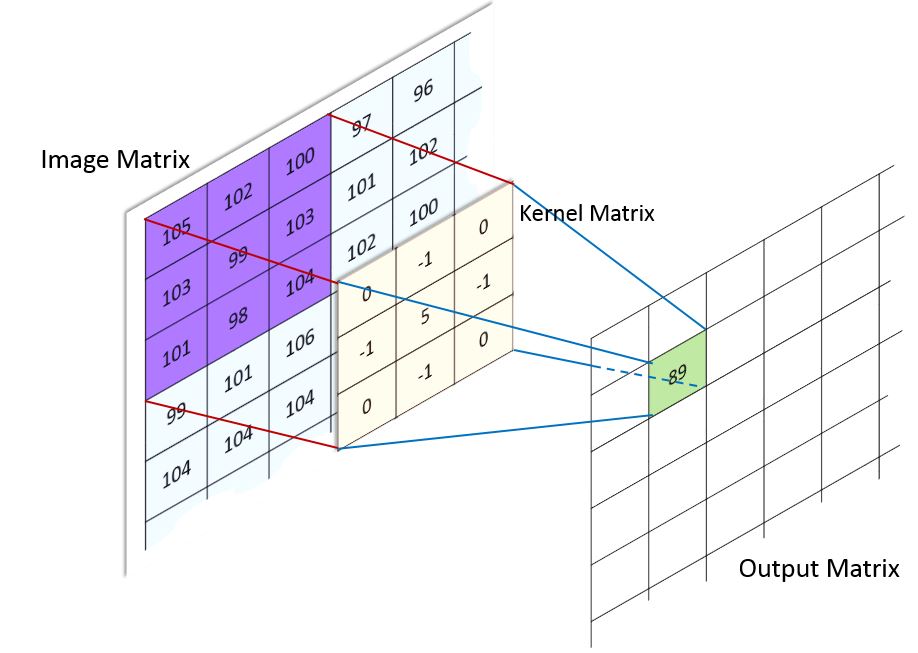
Convolução é o processo de adicionar cada elemento da imagem aos seus vizinhos locais, compensado por um núcleo ou Kernel. O kernel ou matriz de convolução, ou ainda “máscara”, é uma pequena matriz, que determina o que deve ser ser multiplicado e adicionado a cada pixel, gerando uma imagem menor.
É utilizada em operações de sharpening, blurring, embossing, detecção de bordas e outras operações em imagens.
(crédito)
O kernel é rotacionado sobre todos os pixes da imagem original, gerando uma matriz resumida, onde cada ponto é um resumo das operações de multiplicação de cada elemento do kernel.
Pooling
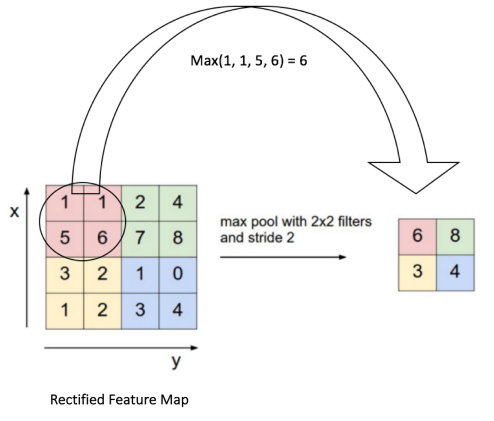
Pooling é o processo de reduzir a dimensionalidade das características, reduzindo o tamanho da entrada. Além de tornar o processamento mais simples e rápido, evita o overfitting.
Utilizamos uma matriz de pooling para sumarizar os pontos da imagem convolucionada. Podemos sumarizar pegando o maior valor de um grupo de pontos (MAX) ou a sua média (AVERAGE).
(crédito)
Camadas de uma rede convolucional
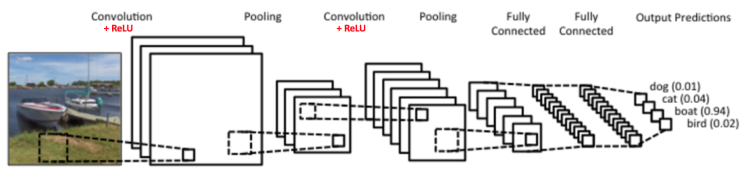
Geralmente, temos um núcleo convolucional, formado por 3 camadas, que pode se repetir em uma CNN, antes de passar para a segunda parte, que é a classificação:
- Convolução;
- Retificação (adicionar não-linearidade);
- Pooling.
A retificação elimina os pontos negativos na imagem, substituindo-os por zero. Ela pode ser feita utilizando qualquer uma das funções de ativação mais comuns, como: ReLU, sigmoid ou tanh.
Geralmente, uma CNN é a união de duas Redes Neurais: uma Convolucional, e outra Classificatória, como na imagem:
(crédito)
O código fonte
O link para o projeto no GitHub está aqui!.
A seguir, uma explicação detalhada do código, dividida em seções.
Este código implementa uma rede neural convolucional (CNN) do zero, voltada para o dataset MNIST (imagens de dígitos manuscritos). A implementação inclui:
- Funções de ativação: A função sigmoide e sua derivada.
- Camadas da rede: Camada convolucional, camada de max pooling, camada de flatten (achatamento) e camada totalmente conectada (dense).
- Treinamento e retropropagação: Processamento forward e backward, com atualização dos pesos.
- Persistência dos pesos: Serialização dos parâmetros da rede em JSON para salvar e, se disponíveis, recarregá-los evitando treinar novamente.
Funções de Ativação e Utilitárias
Sigmoide e sua Derivada
fn sigmoid(x: f32) -> f32 {
1.0 / (1.0 + (-x).exp())
}
fn sigmoid_derivada_da_saida(a: f32) -> f32 {
a * (1.0 - a)
}
- sigmoid: Calcula a ativação sigmoide, transformando qualquer entrada em um valor entre 0 e 1.
- sigmoid_derivada_da_saida: Calcula a derivada da função sigmoide usando o valor já ativado. Essa derivada é usada durante o backpropagation para ajustar os pesos.
Produto Externo
fn produto_externo(a: &Array1<f32>, b: &Array1<f32>) -> Array2<f32> {
let n = a.len();
let m = b.len();
let mut result = Array2::<f32>::zeros((n, m));
for i in 0..n {
for j in 0..m {
result[[i, j]] = a[i] * b[j];
}
}
result
}
- Essa função calcula o produto externo entre dois vetores (necessário para o cálculo dos gradientes em camadas densas).
Camada Convolucional
A struct CamadaConvolucional representa uma camada convolucional básica:
struct CamadaConvolucional {
num_filters: usize,
filter_height: usize,
filter_width: usize,
in_channels: usize,
filters: Array4<f32>,
biases: Array1<f32>,
last_input: Option<Array3<f32>>,
last_output: Option<Array3<f32>>,
}
- fields:
filters: Um tensor 4D com os filtros (kernels) com formato (número de filtros, canais de entrada, altura do filtro, largura do filtro).biases: Um vetor com um bias por filtro.
- last_input e last_output armazenam, respectivamente, a entrada e a saída do forward pass para uso na retropropagação.
Métodos
-
new: Inicializa os filtros e os biases com valores aleatórios (distribuição uniforme entre -1 e 1).
- forward:
- Realiza a operação de convolução “válida” (sem padding e com stride = 1).
- Para cada filtro, para cada posição válida na imagem de entrada, calcula a soma ponderada dos valores locais e adiciona o bias; em seguida, aplica a função sigmoide.
- Armazena a entrada e a saída para uso na retropropagação.
- backward:
- Calcula os gradientes dos filtros, dos biases e da entrada, com base no gradiente recebido (
d_out) e na derivada da função sigmoide. - Atualiza os parâmetros (filtros e biases) usando o learning rate.
- Calcula os gradientes dos filtros, dos biases e da entrada, com base no gradiente recebido (
Camada de Max Pooling
A camada de max pooling reduz a dimensionalidade espacial extraindo o valor máximo em blocos não sobrepostos.
struct MaxPoolingLayer {
pool_size: usize,
last_input: Option<Array3<f32>>,
max_indices: Option<Vec<Array2<(usize, usize)>>>,
}
- last_input: Armazena a entrada para poder mapear os gradientes de volta à posição correta.
- max_indices: Guarda, para cada canal, os índices onde o valor máximo foi selecionado em cada bloco, permitindo o backward direcionado.
Métodos
- forward: Divide cada canal em blocos do tamanho definido por
pool_sizee seleciona o valor máximo de cada bloco. - backward: Propaga o gradiente apenas para as posições dos valores máximos, usando os índices armazenados.
Camada Flatten
A camada de flatten “achata” um tensor 3D (por exemplo, com dimensões: canais, altura e largura) em um vetor 1D, que será a entrada para a camada totalmente conectada.
struct FlattenLayer {
input_shape: Option<(usize, usize, usize)>,
}
- forward: Salva a forma original e converte o tensor em um vetor.
- backward: Reverte o achatamento para restaurar a forma original dos dados.
Camada Totalmente Conectada (Dense)
Representa uma camada densa (fully connected):
struct DenseLayer {
weights: Array2<f32>, // (output_size, input_size)
biases: Array1<f32>, // (output_size)
last_input: Option<Array1<f32>>,
last_output: Option<Array1<f32>>,
}
- weights: Matriz de pesos que conecta a entrada à saída.
- biases: Vetor de biases para cada neurônio de saída.
- last_input e last_output: Usados para a retropropagação.
Métodos
- new: Inicializa pesos e biases aleatoriamente.
- forward: Calcula o produto dos pesos com a entrada, adiciona os biases e aplica a função sigmoide.
- backward: Calcula os gradientes dos pesos, biases e da entrada, e atualiza os parâmetros.
Estrutura da CNN
A struct CNN compõe as camadas implementadas:
struct CNN {
conv: CamadaConvolucional,
pool: MaxPoolingLayer,
flatten: FlattenLayer,
fc: DenseLayer,
}
Métodos
- new: Constrói a rede criando cada camada com os parâmetros apropriados. Calcula as dimensões intermediárias (por exemplo, a dimensão da saída da camada convolucional e do pooling) para definir o tamanho do vetor de entrada da camada densa.
- forward: Encadeia as operações: a entrada passa pela camada convolucional, depois pelo pooling, é achatada e finalmente processada pela camada totalmente conectada.
- backward: Propaga o gradiente recebido de volta por todas as camadas, na ordem inversa da propagação forward.
- train: Executa um passo de treinamento para um exemplo: faz forward, calcula a derivada do erro (aqui, usando MSE como referência) e executa o backward.
- get_weights & load_weights: Permitem salvar e carregar os parâmetros da rede para persistência entre execuções.
Persistência dos Pesos
A struct CNNWeights (anotada com #[derive(Serialize, Deserialize)]) é usada para armazenar os parâmetros que desejamos salvar:
#[derive(Serialize, Deserialize)]
struct CNNWeights {
conv_filters: Array4<f32>,
conv_biases: Array1<f32>,
fc_weights: Array2<f32>,
fc_biases: Array1<f32>,
}
As funções save_weights e load_weights_from_file utilizam a crate serde_json para serializar e desserializar os pesos para um arquivo JSON. Essa estratégia permite que, se os pesos já estiverem salvos, o programa os carregue e evite treinar novamente a rede.
Pipeline de Treinamento e Teste
No main:
-
Carregamento do MNIST:
A cratemnisté usada para baixar e preparar o dataset. As imagens são normalizadas para o intervalo [0, 1]. Em seguida, os dados são convertidos para o formato esperado (imagens comoArray3<f32>e rótulos convertidos para vetores one-hot). -
Divisão dos Dados:
Para acelerar o exemplo, é usado um subconjunto (por exemplo, 1000 amostras de treinamento e 200 de teste). -
Configuração da CNN:
São definidos os parâmetros da rede (por exemplo, 1 canal de entrada, dimensões 28×28, 8 filtros na camada convolucional, etc.). -
Verificação dos Pesos:
Se o arquivo de pesos existe, os parâmetros são carregados; caso contrário, a rede é treinada por um número de épocas, e após o treinamento os pesos são salvos para futuras execuções. -
Predição Final:
O programa realiza uma predição em uma imagem de teste e exibe a saída prevista e o rótulo esperado.
Resumo
Este código demonstra, de maneira didática, como implementar uma CNN do zero em Rust, desde a definição das camadas básicas e suas operações forward/backward até a persistência dos pesos usando serialização JSON. Cada parte foi construída de forma modular, permitindo que desenvolvedores intermediários possam entender e adaptar a implementação para experimentos e projetos mais complexos.
Essa abordagem proporciona uma visão aprofundada dos conceitos de redes neurais convolucionais e do fluxo de dados durante o treinamento e a inferência, servindo tanto para aprendizado quanto para futuras extensões e otimizações.
Treinamento, teste e inferência
Ao executar cargo run ele treinará o modelo e salvará os pesos no arquivo pesos.json, depois, fará uma inferência de teste.
Baixando e carregando o MNIST...
Treinamento: 1000 amostras; Teste: 200 amostras
Pesos não encontrados. Iniciando treinamento...
Epoch 1: Test MSE = 0.093142
Epoch 2: Test MSE = 0.089582
Epoch 3: Test MSE = 0.086736
Epoch 4: Test MSE = 0.084437
Epoch 5: Test MSE = 0.083292
Epoch 6: Test MSE = 0.081915
Epoch 7: Test MSE = 0.080214
Epoch 8: Test MSE = 0.078670
Epoch 9: Test MSE = 0.077400
Epoch 10: Test MSE = 0.076310
Treinamento concluído. Salvando pesos...
Predição para a primeira imagem do teste:
Saída prevista: [9.21565e-5, 0.00017337395, 0.007715295, 0.015219106, 0.000297992, 2.2828715e-5, 0.0006794478, 0.9792802, 0.033919033, 0.0019736418], shape=[10], strides=[1], layout=CFcf (0xf), const ndim=1
Rótulo esperado: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0], shape=[10], strides=[1], layout=CFcf (0xf), const ndim=1
Se quiser que ele repita o treinamento, é só deletar o arquivo pesos.json.
Como podemos ver, ele acertou o dígito: 7.