rustingcrab
Simulação Física com Octógono Giratório
Bombou por aí essa demo para testar IA. Houve variações com quadrado e octógono. Quando vi, achei um excelente desafio para fazer com Rust e ggez. Depois de muita p0rr@da consegui fazer e documentei tudo para você.
Depois de fazer, pedi para algumas IAs fazerem demo semelhante e todas erraram feio. Há muitos detalhes que só um programador humano consegue resolver.
O código
Este código demonstra uma simulação física simples utilizando a biblioteca gráfica ggez em Rust. Um octógono gira continuamente enquanto uma bola quica em suas bordas, com detecção de colisão e física básica. O código demonstra conceitos de transformações geométricas, vetores e renderização 2D (tudo matemática de ensino médio, mas não é mole não!).
A documentação está em comentários dentro do código-fonte.
- Estruturas Principais
- Estado: Controla o estado global do jogo, armazenando:
octogono: Objeto gráfico do octógonorotacao_octogono: Ângulo atual de rotação (em radianos)bola: Objeto da bola com física
- Bola: Gerencia a física e propriedades da bola:
- Posição, velocidade, raio
- Temporização para controle de quiques
- Lógica de colisão com as bordas
- Estado: Controla o estado global do jogo, armazenando:
- Funções Chave
-
Bola::update():
Aplica gravidade (980 pixels/s²) e atualiza a posição. Permite quiques a cada 0.5 segundos. -
Bola::verificar_colisao_ajustar():
Detecta colisões usando projeção vetorial. Calcula o ponto mais próximo nas arestas do octógono e ajusta a posição/velocidade da bola. -
Estado::update():
Atualiza a rotação do octógono (1 radiano/segundo) e transforma seus vértices usando trigonometria.
-
Cálculos Trigonométricos
A rotação do octógono é calculada para cada vértice usando:
let rot_x = ponto.x * cos(θ) - ponto.y * sin(θ);
let rot_y = ponto.x * sin(θ) + ponto.y * cos(θ);
θ: Ângulo de rotação acumuladocos/sin: Funções trigonométricas para rotação 2D- Após a rotação, os pontos são transladados para o centro da tela (400, 300).
Transformações Geométricas
- Rotações:
- Cada vértice do octógono é rotacionado individualmente.
- Mantém-se o centro geométrico fixo durante a rotação.
- Colisões:
- Conversão entre sistemas de coordenadas: nalgebra → mint → ggez.
- Reflexão do vetor velocidade usando produto escalar para simular quique.
Sobre o ggez
- Biblioteca leve para criação de jogos 2D em Rust.
- Funcionalidades usadas:
- Gerenciamento de janela e contexto gráfico
- Renderização de formas básicas (círculos, polígonos)
- Sistema de coordenadas e transformações
- Loop principal de jogo (
EventHandler)
Se você quiser ver uma demonstração que eu fiz com ggez **abra o projeto ferris_hunter.
Como Executar
- Pré-requisitos
- Rust e Cargo instalados (rust-lang.org)
-
Passos
# Clone o projeto (ou crie os arquivos manualmente) git clone [URL_DO_REPOSITORIO] # Entre no diretório cd projeto # Execute (o Cargo cuidará das dependências) cargo run --release - Controles
- A simulação é automática.
- Feche a janela para encerrar.
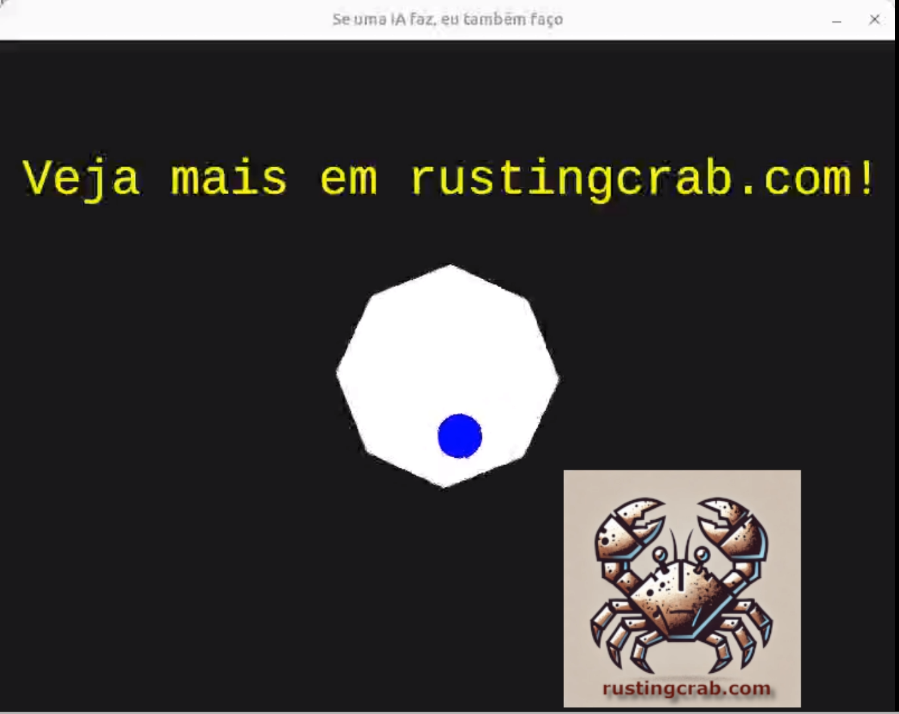
Resultado Esperado
- Janela 800x600 com fundo escuro.
- Octógono branco girando no centro.
- Bola azul quicando nas bordas.